
 |
Fiche descriptive :
Y6 prototype fait "maison" Emetteur : Futaba 7CP Contrôeur de vol : Module NAZA DJI Innovation + GPS Longueur des bras (rayon) : 19 cm Poids : 1100 g sans "charge utile" Accus Lipo 3S 3300 mAh 25C Autonomie 8 minutes Hélices 8x4 Moteurs Suppo 2212/13, ESC Suppo 25A |
Petite présentation des étapes de construction ...
 |
Gros plan sur 1 des bras :
Carte électronique pour prototype (avec des trous donc) Entretoises de chez Radiospare Vis de Leroy Marché |
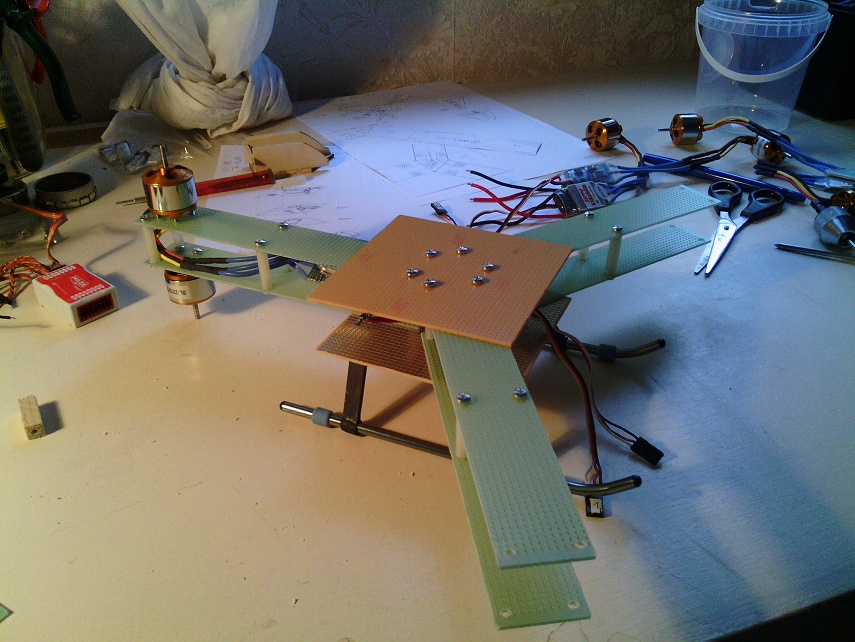 |
Premier assemblage à blanc.
Temporairement posé sur un train de Trex450. |
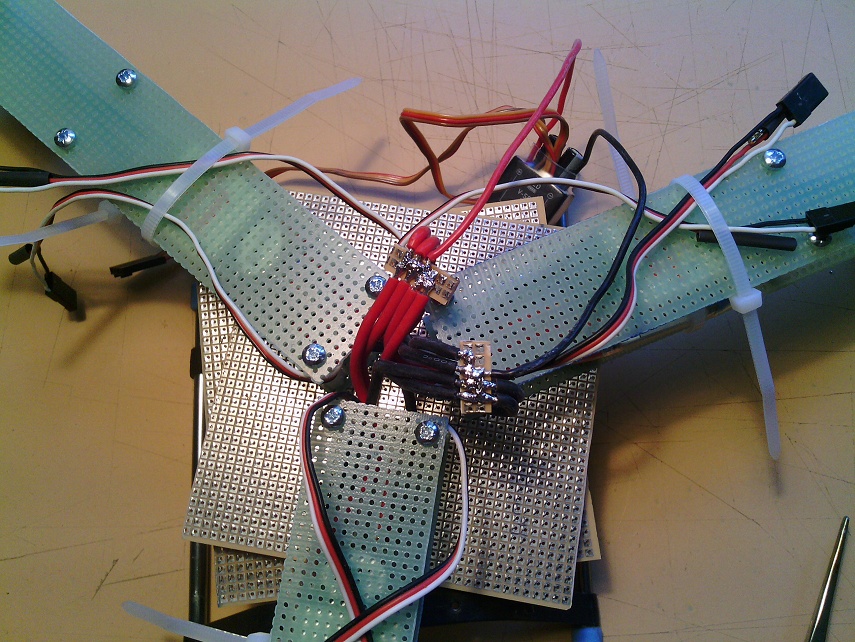 |
Brasure des ESC sur une morceau de carte électronique.
Il manque les fils pour raccorder l'accu. La section est ~2x plus grosse. Comme ceux de l'accu en fait. |
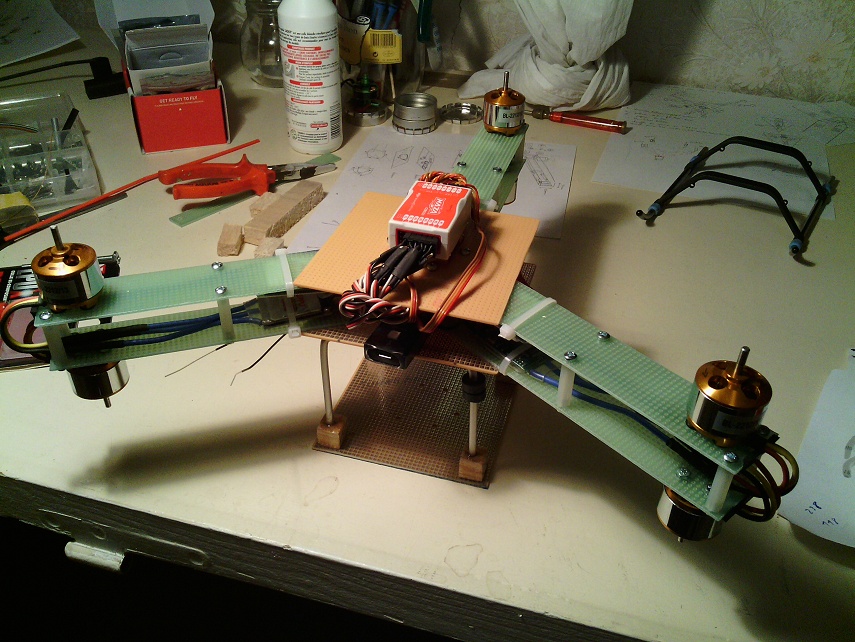 |
Prêt pour les réglages du Naza.
Posé sur le futur train, pour faire sécher la colle. |
 |
Première sortie : 2 novembre 2012 !!!
(sur la table du jardin) Avec la radio pour donner l'échelle. |
 |
Version V0.2 :
- Léger écartement du train pour plus de stabilité - Montage du GPS - Scotch blanc d'électricien pour protéger le Naza des coups de soleil 
|
 |
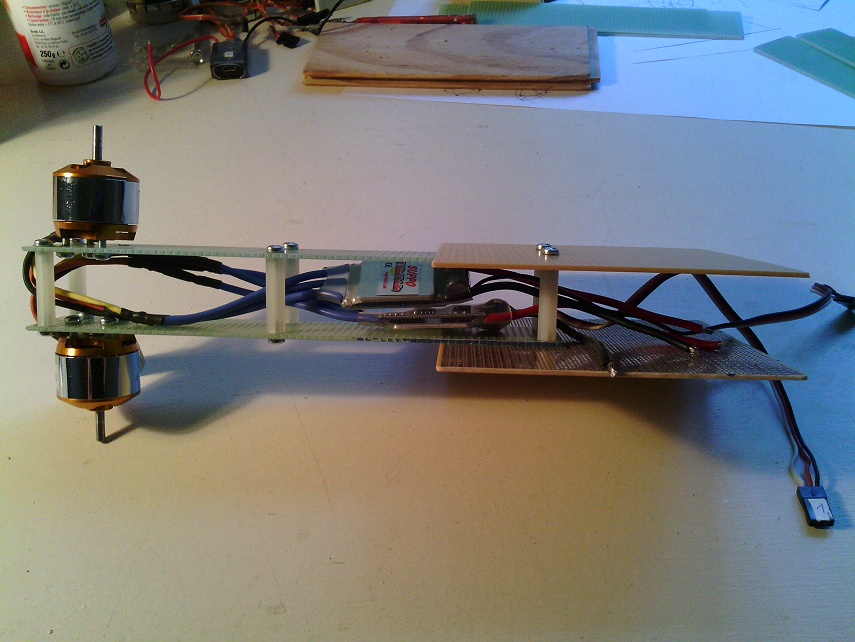
Vue de droite :
La carte Naza est descendu de 2 étages (et devient invisible) Le récepteur est maintenant tête en bas Vue sur l'accu 2S 350 mAh pour l'émetteur vidéo |
 |
Vue de gauche :
Vue sur l'émetteur vidéo antenne "bâton" standard orientée vers le bas L'accu de propulsion est maintenant sur le dessus derrière la caméra de FPV |
 |
Vue de face :
La caméra de FPV : filme et envoie ses infos aux lunettes écran posées sur mon nez La filasse, ce sont tous les contrôleurs des moteurs qui vont au module Naza |
| |
Au décollage ...
Sous la caméra FPV, une autre (HK) qui enregistre le vol sur carte SD |
La caméra qui enregistre est sensible aux vibrations d'où un effet "vague".
Et oui, ce n'est pas une GOPRO !
D'un autre côté, j'en ai eu pour mon argent (30€) ...

|
Premiers vols en immersion : je n'ose pas encore aller vite car il y avait pas mal de vent ce jour là. |
| Et pour s'amuser à 2, essai de filmer le Tucan de Fred en vol !
Pour nous coordonner, il nous fallait un coach : Merci JLuc ! |
 |
On prend une vieille rallonge d'antenne, celle pour la vieille télé. |
 |
On récupère à l'intérieur de la gaine du cable coaxial, le fil de cuivre de 0,8 mm. |
 |
J'avais acheté sur ebay une rallonge de câble coaxial avec à chaque bout des prises SMA, que j'ai donc coupée en 2 (pour faire 2 antennes). On trouve sur internet des vidéos et des tutos excellents pour arriver à ce résultat ... |
 |
Après avoir préparé les lobes, on les soude en place sur le cable coaxial. C'est beau ! |
 |
3 lobes pour l'emission, 4 pour la réception. Ca s'appelle des antennes Cloverleaf. |
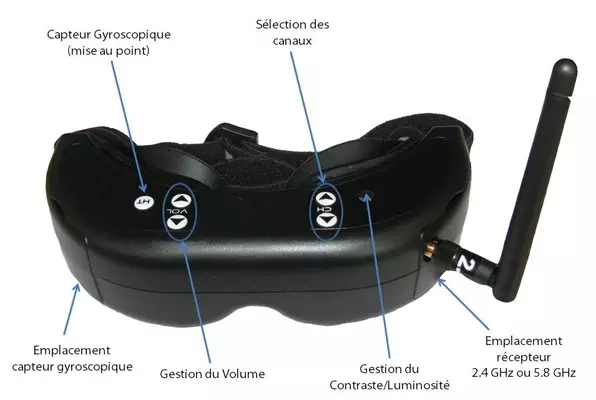 |
Dominator de chez Fatshark
Récepteur en 5,8 GHz Pas (encore ?) de capteur gyroscopique. |
 |
FATAL ERROR
de ma part ... Plaque inférieure, train d'atterrissage cassés, antenne décapitée et quelques zébrures sur le fil d'alimentation de la caméra |